# ndt_omp
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
For using this package in non-ROS1 projects (ROS2 or without ROS), see forked repositories: [dfki-ric/pclomp](https://github.com/dfki-ric/pclomp) [tier4/ndt_omp](https://github.com/tier4/ndt_omp).
[](https://github.com/koide3/ndt_omp/actions/workflows/build.yml)
### Benchmark (on Core i7-6700K)
```
$ roscd ndt_omp/data
$ rosrun ndt_omp align 251370668.pcd 251371071.pcd
--- pcl::NDT ---
single : 282.222[msec]
10times: 2921.92[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 207.697[msec]
10times: 2059.19[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 139.433[msec]
10times: 1356.79[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 34.6418[msec]
10times: 317.03[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 54.9903[msec]
10times: 500.51[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 63.1442[msec]
10times: 343.336[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 17.2353[msec]
10times: 100.025[msec]
fitness: 0.208511
```
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely the same as that of the original pcl::NDT. We recommend using pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
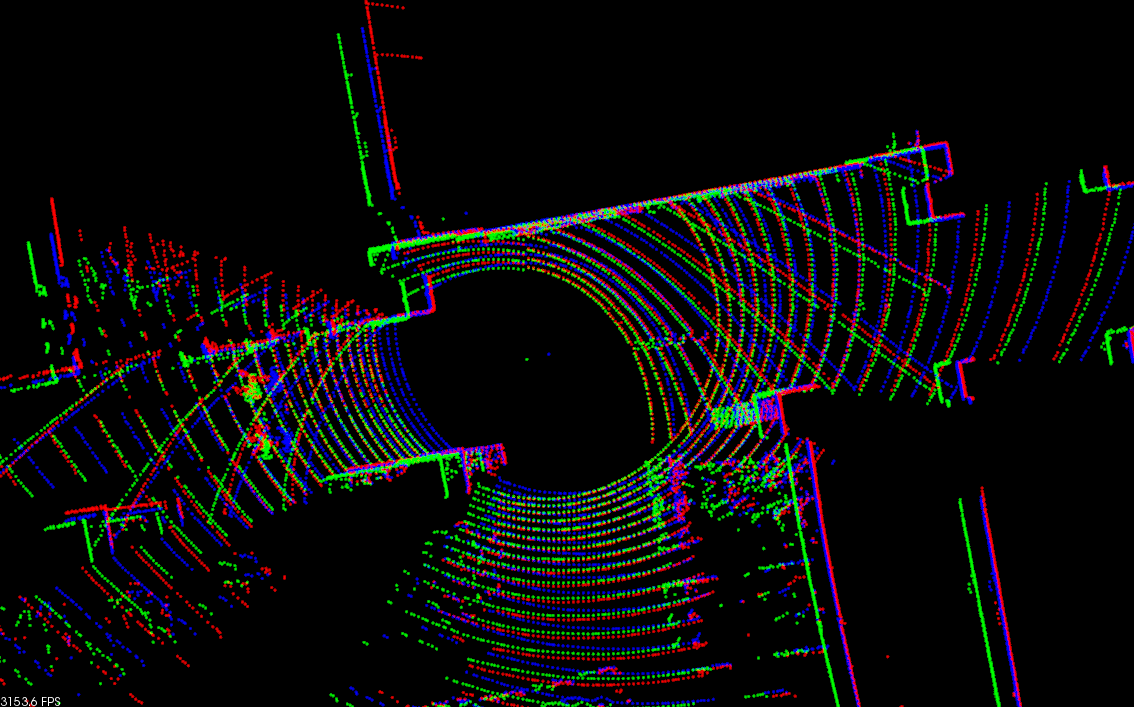
Red: target, Green: source, Blue: aligned
## Related packages
- [ndt_omp](https://github.com/koide3/ndt_omp)
- [fast_gicp](https://github.com/SMRT-AIST/fast_gicp)